Robotic Handling & Leak Testing of Pumps
Machine supplied: Robotic handling and Leak Testing Solution.
Client: Leading Global Automotive Seating Support Manufacturer
Part: Pump Motor Housings
Throughput: 240+ parts per hour
Test Method: Vacuum and Overpressure Leak Testing
The Challenge
A leading global automotive seating support manufacturer needed automated leak testing for pump motor housings used in seat comfort systems. The test requirements included:
- High throughput (240+ pumps per hour) for production volumes
- Tray-based material handling compatible with upstream/downstream processes
- Dual leak testing (vacuum and overpressure) to verify seal integrity
- Automated loading/unloading to eliminate manual handling bottlenecks
- Continuous operation with tray replenishment during running
- Reject segregation and automatic tray filling
- Approximately 30 minutes unmanned running between tray changes
Manual leak testing couldn’t achieve the required throughput, and manual part handling risked contamination and damage to pump housings. The system needed to integrate with existing tray-based logistics while maintaining production speed.
The Solution
TQC designed a robotic handling system using a Fanuc 6-axis robot with twin grippers to service two leak test stations alternately. The walking beam tray transfer mechanism enables continuous operation by loading new trays and unloading tested parts while the robot continues testing. MALT (Multi-Application Leak Tester) units perform both vacuum and overpressure testing, ensuring pump housings meet seal integrity requirements across all operating conditions.

Technical Overview – Robotic Handling & Leak Testing
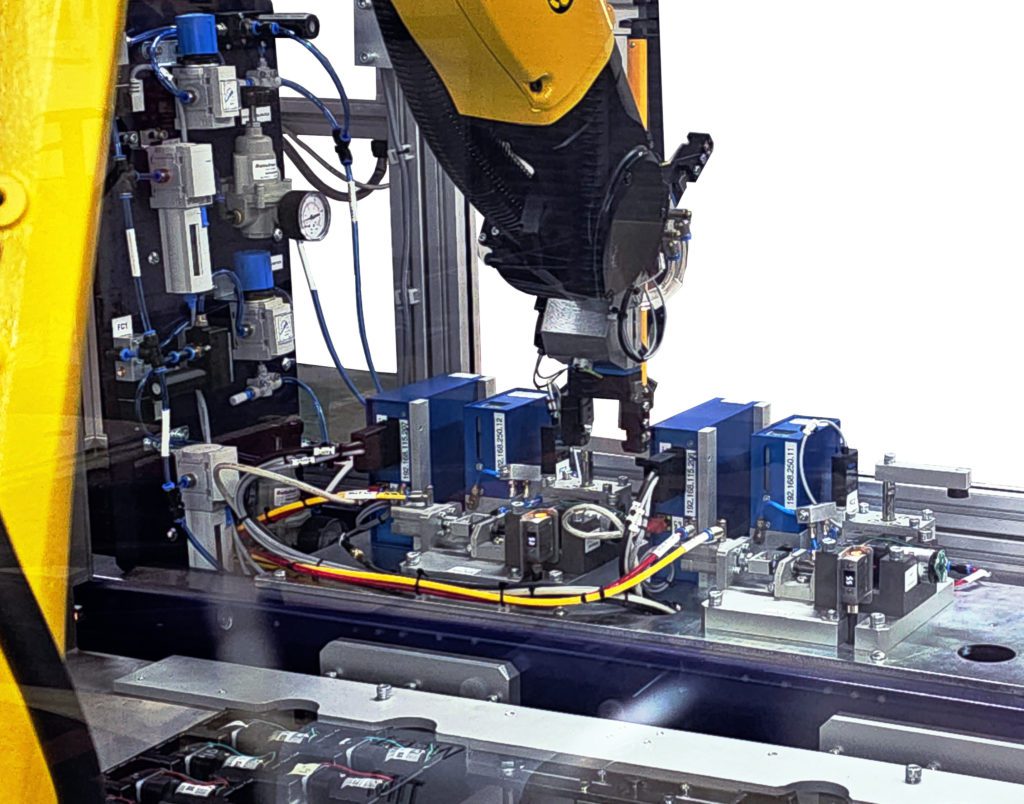
Robotic Handling System
Fanuc 6-Axis Robot: Industrial robot provides the flexibility to handle pump housings from tray positions to test stations with complex motion paths. The 6-axis configuration accommodates part orientation requirements and navigates around fixtures.
Twin Gripper Configuration: The robot end-effector includes two grippers that operate independently:
- Gripper 1: Picks untested pump from input tray, carries to test station
- Gripper 2: Picks tested pump from opposite test station, carries to output tray
This twin gripper approach maximizes robot utilisation – the robot always carries two parts (one inbound, one outbound), eliminating empty travel time.
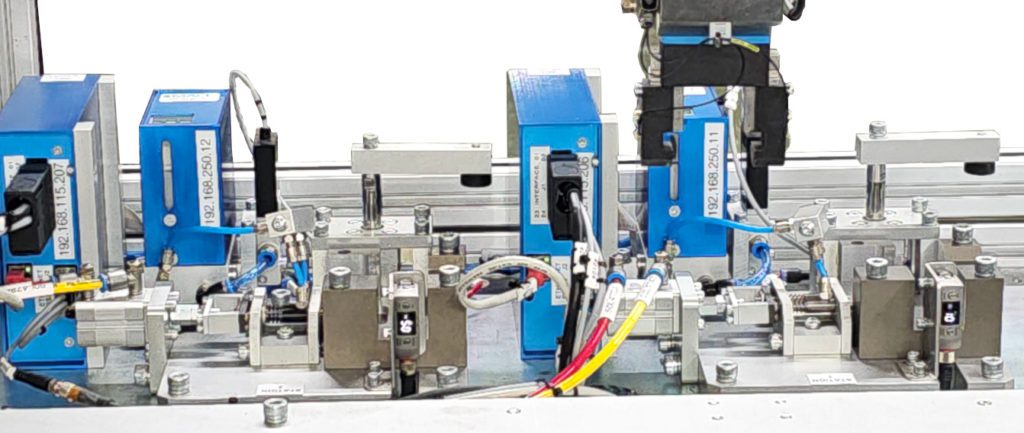
Alternate Station Service: The robot services two leak test stations in alternating sequence:
- Robot picks untested pump with Gripper 1, picks tested pump from Station 1 with Gripper 2
- Robot places untested pump in Station 1, places tested pump in output tray
- Robot picks untested pump with Gripper 1, picks tested pump from Station 2 with Gripper 2
- Robot places untested pump in Station 2, places tested pump in output tray
- Cycle repeats
This alternation allows one station to test while the robot loads/unloads the other station, maintaining continuous throughput.
Walking Beam Tray Transfer
Tray-Based Material Flow: Pump housings arrive in trays from upstream processes. Tested pumps return in trays to downstream assembly. The walking beam mechanism manages tray movement:
Infeed Stacker: Holds multiple trays of untested pumps. As the robot empties a tray, the walking beam indexes to present the next full tray.
Active Positions: Two tray positions are active simultaneously:
- Pick Position: Robot picks untested pumps from this tray
- Place Position: Robot places tested pumps into this tray (the previously emptied tray)
Walking Beam Indexing: When the pick tray empties and the place tray fills:
- Filled output tray transfers to outfeed stacker
- Empty input tray moves to place position
- New full tray from infeed stacker moves to pick position
- System continues without stopping
Outfeed Stacker: Accumulates filled trays of tested pumps for removal by material handling.
Continuous Operation: Operators can load new input trays to the infeed stacker and remove tested tray stacks from the outfeed stacker while the machine runs, enabling approximately 30 minutes of unmanned operation.
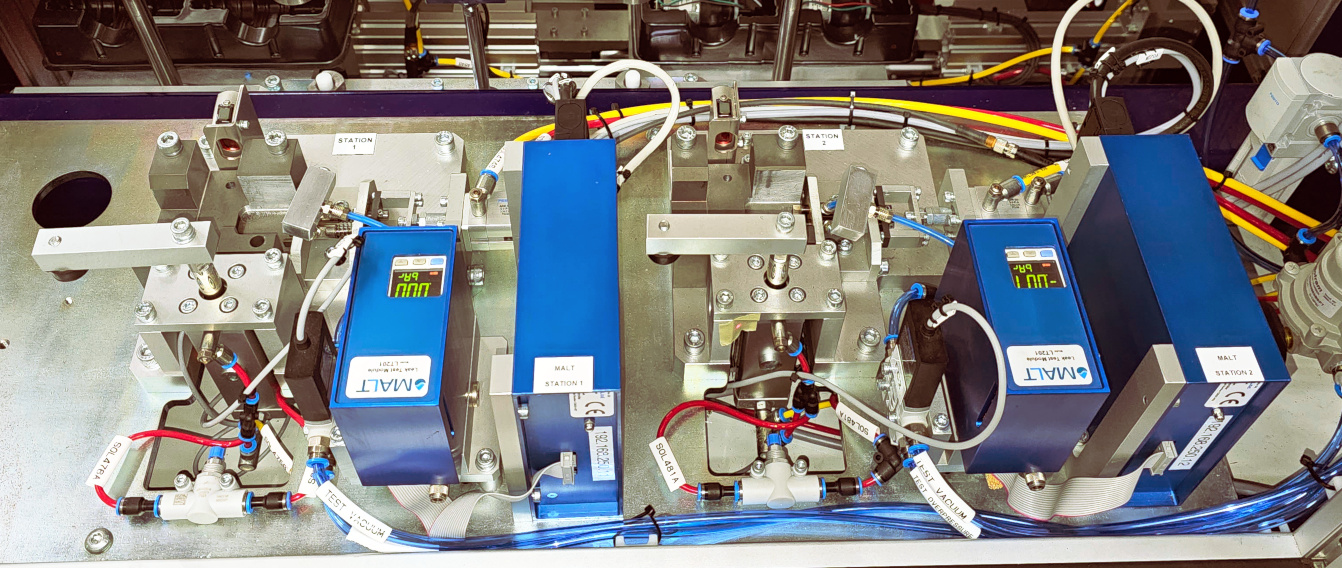
Dual Leak Test Stations
Two independent leak test stations allow continuous testing while the robot handles parts:
MALT Leak Test Instruments: Each station includes a Multi-Application Leak Tester (MALT) unit that performs:
Vacuum Testing: The pump housing interior is evacuated and monitored for pressure rise. Leaks in seals or housing walls allow air ingress, causing measurable pressure increase.
Overpressure Testing: The pump housing interior is pressurized and monitored for pressure decay. Leaks allow air to escape, causing measurable pressure drop.
Dual Test Requirement: Both vacuum and overpressure tests verify seal integrity across all pump operating conditions. Some leak paths only manifest under specific pressure differentials.
Test Fixtures: Each station includes a fixture that:
- Locates the pump housing accurately
- Creates sealed connections to pump ports for pressurisation/evacuation
- Holds the pump securely during testing
Test Cycle Overlap: While Station 1 tests a pump (15 seconds), the robot loads Station 2. While Station 2 tests, the robot unloads Station 1 and loads a new pump. This overlap maintains the 15-second overall cycle time.
Reject Handling
Automatic Segregation: Failed pumps are identified by the MALT test result. The robot places rejected pumps in a separate reject drawer rather than the output tray.
Reject Drawer: Collects failed pumps for inspection, rework, or scrap. Operators periodically empty the drawer during tray changeover.
Replenishment Tray: To ensure output trays are completely filled (maintaining tray count consistency for downstream processes), a replenishment tray containing known-good pumps is available. If rejects accumulate, the robot draws from the replenishment tray to fill output trays to the correct count.
Traceability: The system tracks reject rate and can log which input tray positions produced failures, enabling upstream process correlation.
Safety Guarding
Full Machine Guarding: Interlocked perimeter guarding encloses the robot work envelope and test stations. Access doors cannot open while the robot operates.
Light Curtains: Additional safety zones use light curtains for tray loading/unloading areas that require operator access during running.
Emergency Stop: Accessible e-stop buttons halt all motion immediately if required.
Control System – Robotic Handling & Leak Testing
PLC Control: Programmable logic controller manages:
- Robot motion sequencing
- Walking beam tray indexing
- MALT leak test coordination
- Reject handling logic
- Operator interface
Robot Integration: The PLC coordinates with the Fanuc robot controller, providing test results and tray status. The robot reports pick/place completion and part presence.
Operator Interface: Touchscreen HMI displays:
- Production count (tested, passed, rejected)
- Current tray status (parts remaining in pick tray, parts in place tray)
- Reject rate and history
- System status and fault diagnostics
Data Logging: Test results, cycle times, and reject data are logged for quality documentation and process improvement.
System Specifications – Robotic Handling & Leak Testing
- Robot: Fanuc 6-axis with twin gripper end-effector
- Leak Test Stations: 2 (alternating service)
- Leak Test Instruments: MALT (Multi-Application Leak Tester) units
- Test Methods: Vacuum (pressure rise) and overpressure (pressure decay)
- Cycle Time: 15 seconds per part
- Throughput: 240+ parts per hour (4 per minute)
- Material Handling: Tray-based with walking beam transfer
- Infeed Stacker: Multiple tray capacity
- Outfeed Stacker: Multiple tray capacity
- Reject Handling: Dedicated reject drawer with replenishment tray
- Unmanned Operation: Approximately 30 minutes between tray changes
- Safety: Full perimeter guarding with interlocked access
- Control: PLC with robot coordination and operator HMI
- Application: Automotive seat comfort system pump housings
Key Features – Robotic Handling & Leak Testing
Twin Gripper Efficiency: Robot always carries two parts (inbound and outbound), eliminating empty travel and maximizing utilisation.
Dual Station Alternation: While one station tests, the robot loads/unloads the other, maintaining continuous 15-second cycle time.
Walking Beam Tray System: Enables tray loading/unloading during operation for approximately 30 minutes unmanned running.
Dual Leak Testing: Vacuum and overpressure tests verify seal integrity across all pump operating conditions.
Automatic Reject Handling: Failed pumps segregated to reject drawer with replenishment tray maintaining output count.
Tray-Based Integration: Compatible with upstream/downstream tray logistics, no part transfer required.
MALT Instrumentation: Proven leak test platform for automotive production environments.
Results
The robotic handling and leak testing system achieves throughput of 240+ pump housings per hour with automated material handling. The twin gripper robot servicing dual test stations maintains the 15-second cycle time required for production volumes.
Walking beam tray transfer with infeed/outfeed stackers enables approximately 30 minutes of unmanned operation, reducing labour requirements while maintaining continuous production. Operators load input trays and remove tested output stacks during machine running without disrupting testing.
Dual vacuum and overpressure leak testing ensures pump housing seal integrity across all operating conditions. Automatic reject segregation with replenishment maintains output tray count consistency for downstream processes.
To complete the testing requirements, an additional manual leak test bench was supplied for pump variants with flying leads and other configurations not compatible with robotic handling.
To view a printer friendly format please click below
Robotic Handling & Leak Testing of Pumps
Related Capabilities
This project demonstrates TQC‘s expertise in:
- Robotic material handling integration
- Multi-station leak testing systems
- MALT leak test instrumentation
- Vacuum and overpressure leak testing
- Walking beam tray transfer mechanisms
- Twin gripper end-effector design
- Continuous operation with tray-based logistics
- Reject handling and replenishment systems
- Automotive production environments
- PLC and robot controller integration
If you need robotic handling integrated with leak testing for high-throughput production, contact TQC to discuss your requirements.